

Prototyping & Design Laboratory 山中研究室における研究
Caption
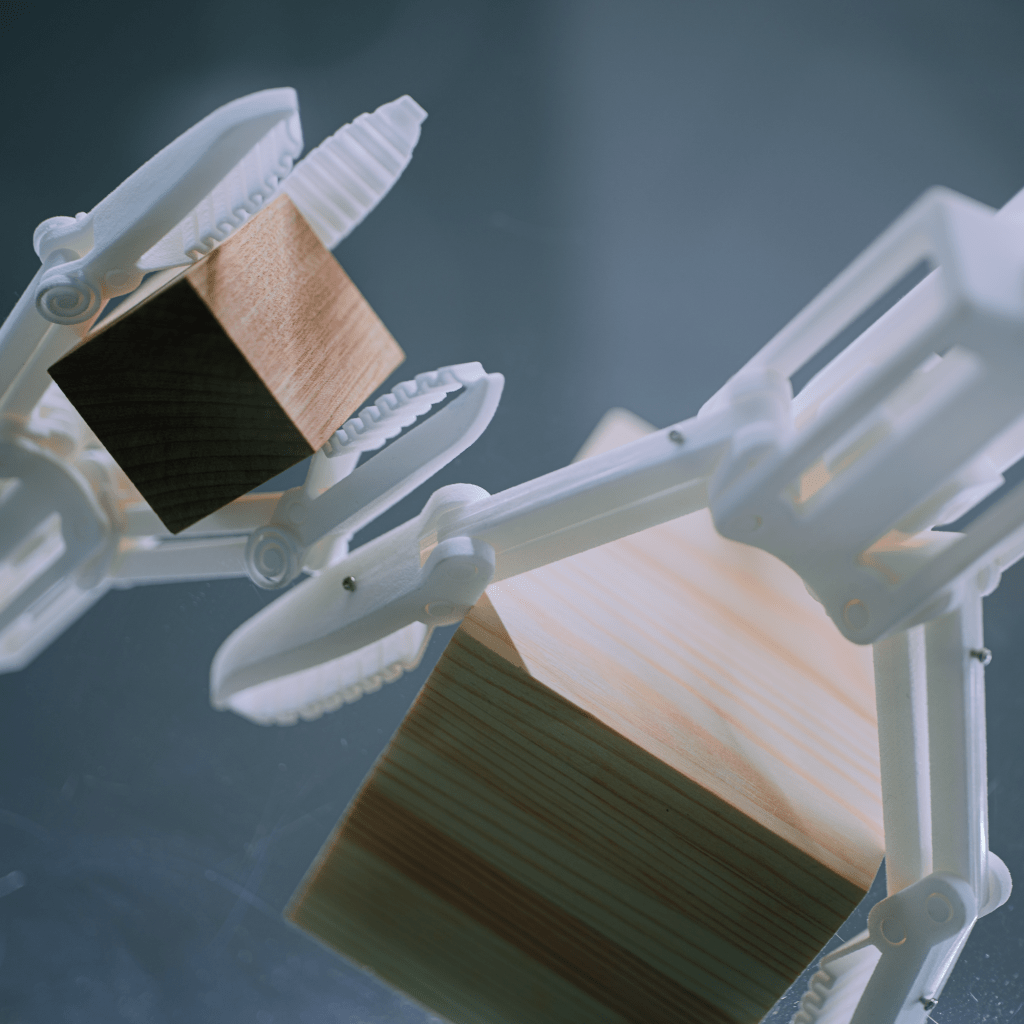
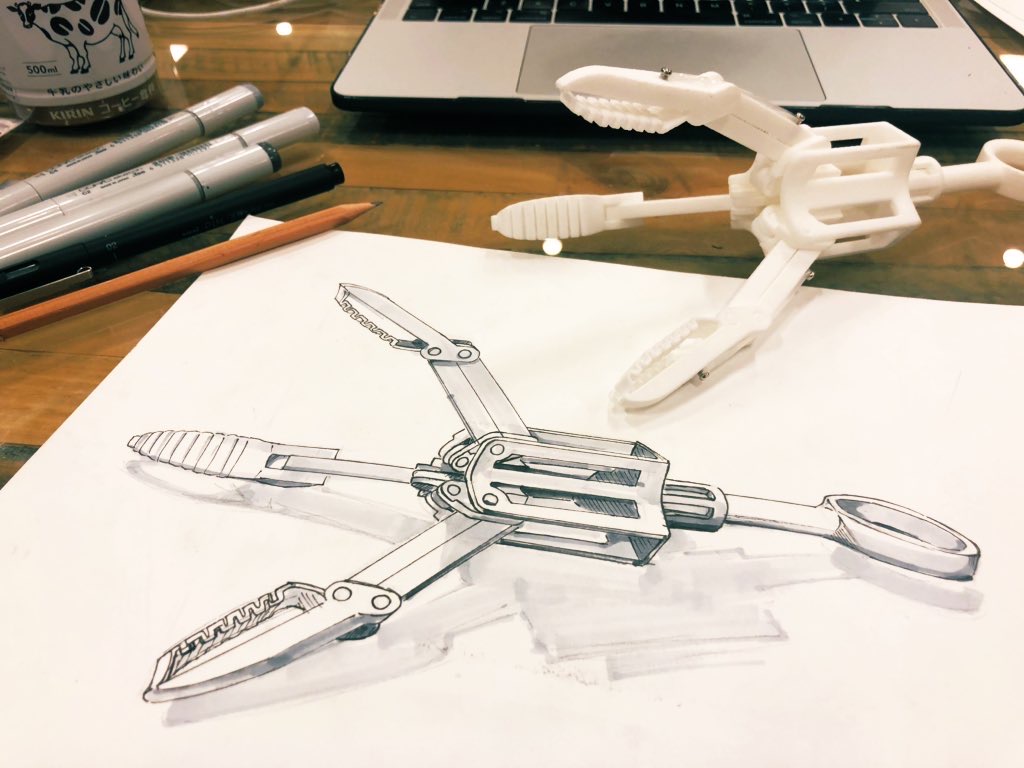
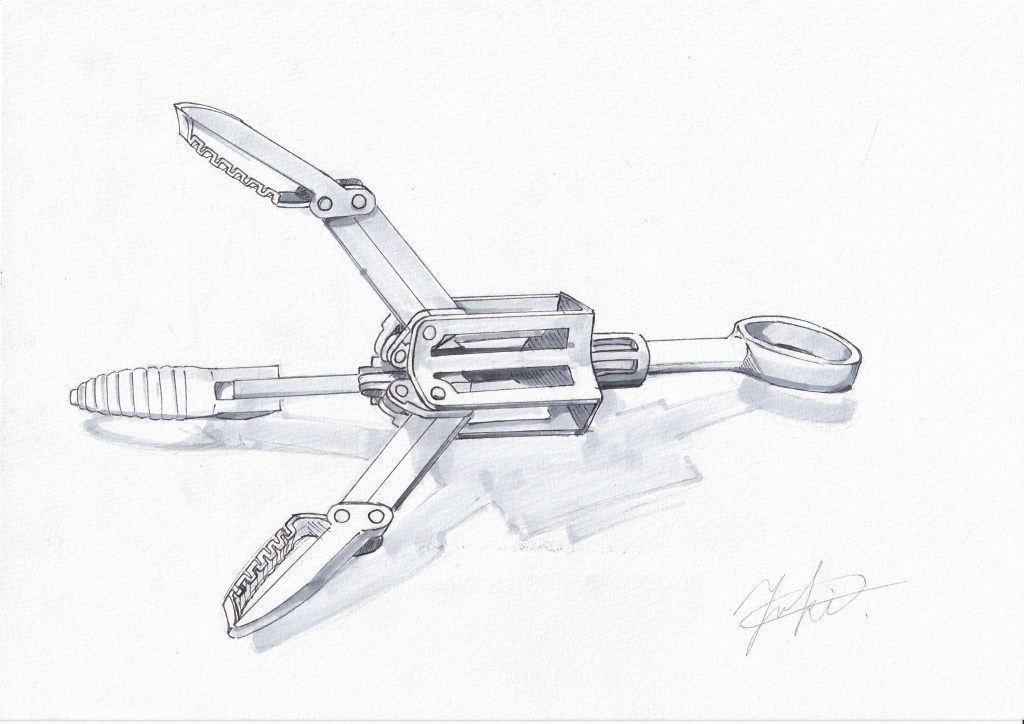
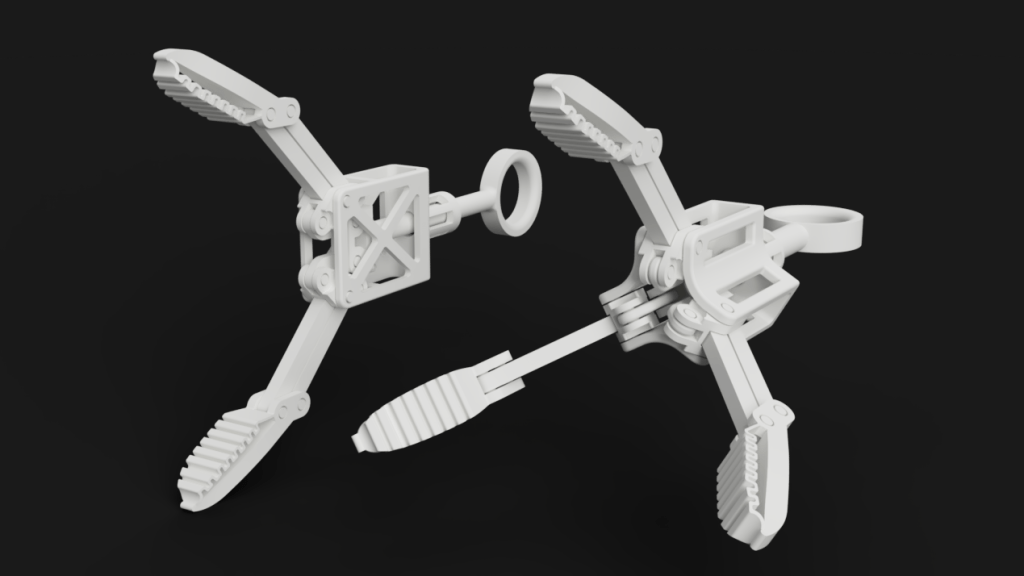
人にはそれぞれ、少しずつ違う手の大きさがあります。しかし、従来の義手やロボットハンドは大きさが段階的で、必ずしもあなたの欲しい手の大きさではないかもしれません。そこで私は、細かなサイズ調整を簡単に行える『Scalable hand』を制作しました。本来は硬いナイロン樹脂から形状を工夫することで、シリコンのように柔らかい指先・バネのような反発性のある関節を再現。これらの部品を3Dプリンタを用いて一度に造形することで組み立てにネジを使う必要がなく、3Dモデルを拡大・縮小するだけでサイズ調整が可能となります。
There are many sizes of hand depending on people. However, the size of current humanoid hands are still limited and may not be a perfect size for each individual. This scalable hand is a non-assembled robot hand that is created using PBF (Powder Bed Fusion) a type of 3D-printer. The changes of the size can be made limitlessly. Nylon, the material used here is normally stiff. But, by devising its geometric shape, it can be very soft and supple.
